
MatheAss 10.0 − Лiнiйна алгебра
Системи лiнiйних рiвнянь
Програма визначає вектор розв’язку системи лiнiйних рiвнянь з n рiвняннями та n невiдомими.
Приклад: Якщо шукаємо параболу через точки P(1/3), Q(2/1) та R(4/9), це приводить до системи рiвнянь
1·x1 + 1·x2 + 1·x3 = 3
4·x1 + 2·x2 + 1·x3 = 1
16·x1 + 4·x2 + 1·x3 = 9
L = ( 2; -8; 9 )
Отже, парабола має рiвняння y = 2x2 - 8x + 9.
Приклад з двовимiрним простором розв’язкiв:
0·x1 + 0·x2 + 2·x3 - 1·x4 = 1
1·x1 + 1·x2 + 1·x3 + 1·x4 = 4
2·x1 + 2·x2 - 4·x3 + 5·x4 = 5
1·x1 + 1·x2 - 7·x3 + 5·x4 = 0
L = { ( 3,5-s-1,5t; s; 0,5+0,5t; t ) | s,t ∈ R }
 Лiнiйна оптимiзацiя
(з лютого 2022)
Лiнiйна оптимiзацiя
(з лютого 2022)
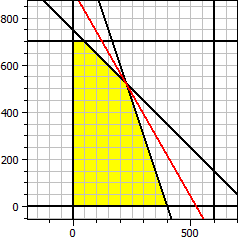
Програма визначає оптимальне рiшення для цiльової функцiї з двома змiнними та лiнiйними нерiвностями як обмеженнями.
Цiльова функцiя: ƒ(x,y) = 140·x + 80·y → максимум Обмеження: x ≥ 0 y ≥ 0 x ≤ 600 y ≤ 700 x + y ≤ 750 3·x + y ≤ 1200 Максимум x = 225 y = 525 ƒ(x,y) = 73500
Лiнiйна комбiнацiя
Програма визначає лiнiйну комбiнацiю вектора з трьох заданих векторiв. Ця процедура також придатна для перевiрки лiнiйної незалежностi трьох векторiв у просторi, тобто чи лежать вони в однiй площинi.
⎧ 1 ⎫ ⎧ 2 ⎫ ⎧ 0 ⎫ ⎧ 2 ⎫
a·⎪ 2 ⎪ + b·⎪ 1 ⎪ + c·⎪ 1 ⎪ = ⎪ 3 ⎪
⎩ 0 ⎭ ⎩ 1 ⎭ ⎩ 0 ⎭ ⎩ 7 ⎭
Розв’язок :
a = -12 b = 7 c = 20
Скалярний добуток
Програма обчислює для двох векторiв їх скалярний добуток, довжину обох векторiв та кут мiж ними.
-> ⎧ 1 ⎫ -> ⎧ 5 ⎫
a = ⎪ 3 ⎪ b = ⎪ 0 ⎪
⎩ 1 ⎭ ⎩ 3 ⎭
Скалярний добуток векторiв = 8
Довжина першого вектора = √11 = 3,3166248
Довжина другого вектора = √34 = 5,8309519
Кут мiж векторами α = 65,564402°
Векторний добуток
Програма обчислює для двох векторiв їх векторний добуток та його модуль. Векторний добуток перпендикулярний до паралелограма, який вони утворюють, а його модуль дорiвнює площi цього паралелограма.
-> ⎧ 1 ⎫ -> ⎧ 7 ⎫
a = ⎪ 2 ⎪ b = ⎪ 1 ⎪
⎩ 3 ⎭ ⎩ 4 ⎭
-> -> ⎧ 5 ⎫ -> ->
a x b = ⎪ 17 ⎪ |a x b|= √483 = 21,977261
⎩-13 ⎭
Мiшковий добуток
Програма обчислює для трьох векторiв їх мiшковий добуток. Його модуль дорiвнює об’єму паралелепiпеда (Spat), утвореного цими трьома векторами.
-> ⎧ 2 ⎫ -> ⎧ 2 ⎫ -> ⎧ 3 ⎫
a = ⎪ 3 ⎪ b = ⎪-1 ⎪ c = ⎪ 9 ⎪
⎩ 5 ⎭ ⎩ 7 ⎭ ⎩ 2 ⎭
-> -> ->
( a x b ) · c = 26
Інверсія матриць
Програма обчислює для квадратної матриці порядку n детермінант, ранг та обернену матрицю.
Матриця: ⎧ 0 1 1 ⎫ ⎪ 0 1 3 ⎪ ⎩ 2 0 1 ⎭ Обернена матриця ⎧ 0,25 -0,25 0,5 ⎫ ⎪ 1,5 -0,5 0 ⎪ ⎩ -0,5 0,5 0 ⎭ Порядок = 3, Ранг = 3, Детермінант = 4
Псевдообернена матриця
Якщо стовпці матриці A лінійно незалежні, то
A+ = ( AT· A )-1· AT
При цьому A+ є лівою оберненою для A ,
тобто виконується:
Матриця A ¯¯¯¯¯¯¯¯ ⎧ 1 1 1 1 ⎫ ⎩ 5 7 7 9 ⎭ AT· A ¯¯¯¯¯ ⎧ 26 36 36 46 ⎫ ⎪ 36 50 50 64 ⎪ ⎪ 36 50 50 64 ⎪ ⎩ 46 64 64 82 ⎭ AT· A не оборотна A · AT ¯¯¯¯¯¯ ⎧ 4 28 ⎫ ⎩ 28 204 ⎭ ( A · AT )-1 ¯¯¯¯¯¯¯¯¯¯¯ ⎧ 6,375 -0,875 ⎫ ⎩ -0,875 0,125 ⎭ Права обернена: AT · ( A · AT )-1 ¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ ⎧ 2 -0,25 ⎫ ⎪ 0,25 0 ⎪ ⎪ 0,25 0 ⎪ ⎩ -1,5 0,25 ⎭
Множення матриць
Програма обчислює для двох матриць їхню добуткову матрицю.
1-ша матриця 2-га матриця ⎧ 1 2 3 0 ⎫ ⎧ 1 2 3 4 ⎫ ⎪ 4 5 6 0 ⎪ ⎪ 5 6 7 8 ⎪ ⎪ 0 0 0 0 ⎪ ⎪ 9 10 11 12 ⎪ ⎩ 0 0 0 0 ⎭ ⎩ 0 0 0 0 ⎭ Добуткова матриця ⎧ 38 44 50 56 ⎫ ⎪ 83 98 113 128 ⎪ ⎪ 0 0 0 0 ⎪ ⎩ 0 0 0 0 ⎭
